Apparent Motion of Satellites
地球を周回する人工衛星を地上の望遠鏡から観測したときのみかけの速度を見積もります.
状況設定
計算を簡単にするために以下の状況を設定しました.
- 人工衛星は地球中心の周りを等速円運動する.
- 観測者は人工衛星の運動面内に存在する.
- 観測者の位置を地球中心座標で \((X,Y) = (0,1)\) とする.
- 人工衛星の軌道位相を \(\theta\) で表す. \(\theta = 0\) は \((X, Y) = (0, 1)\) の方向とする.
- 観測者からみた人工衛星の位置を \(\phi\) で表す. \(\theta = 0\) のとき \(\phi = 0\) とする.
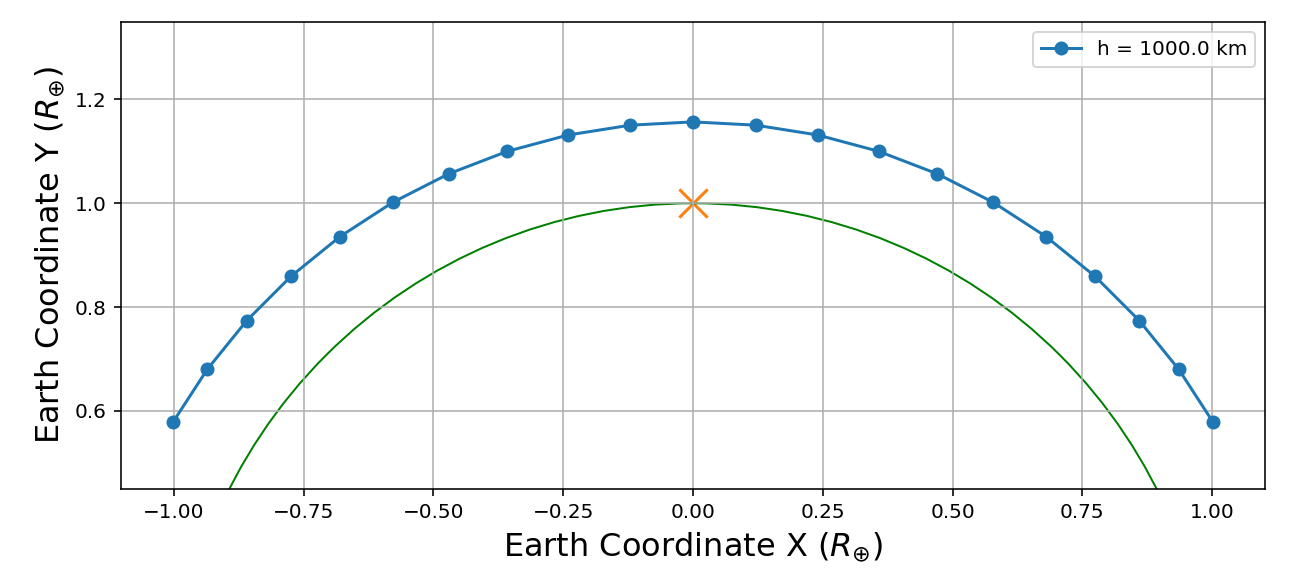
以下に観測者と人工衛星の位置関係を表す概略図を示します. オレンジ色の × が観測者の位置を表しています. 青色の丸は人工衛星の位置です.
人工衛星の運動
地球の平均半径を \(R_\oplus\) とする. 高度 \(h\) を円軌道で周回する人工衛星の速度は第一宇宙速度で見積もることができます. \(G\) を重力定数, \(M_\oplus\) を地球質量として以下の式で与えられます.
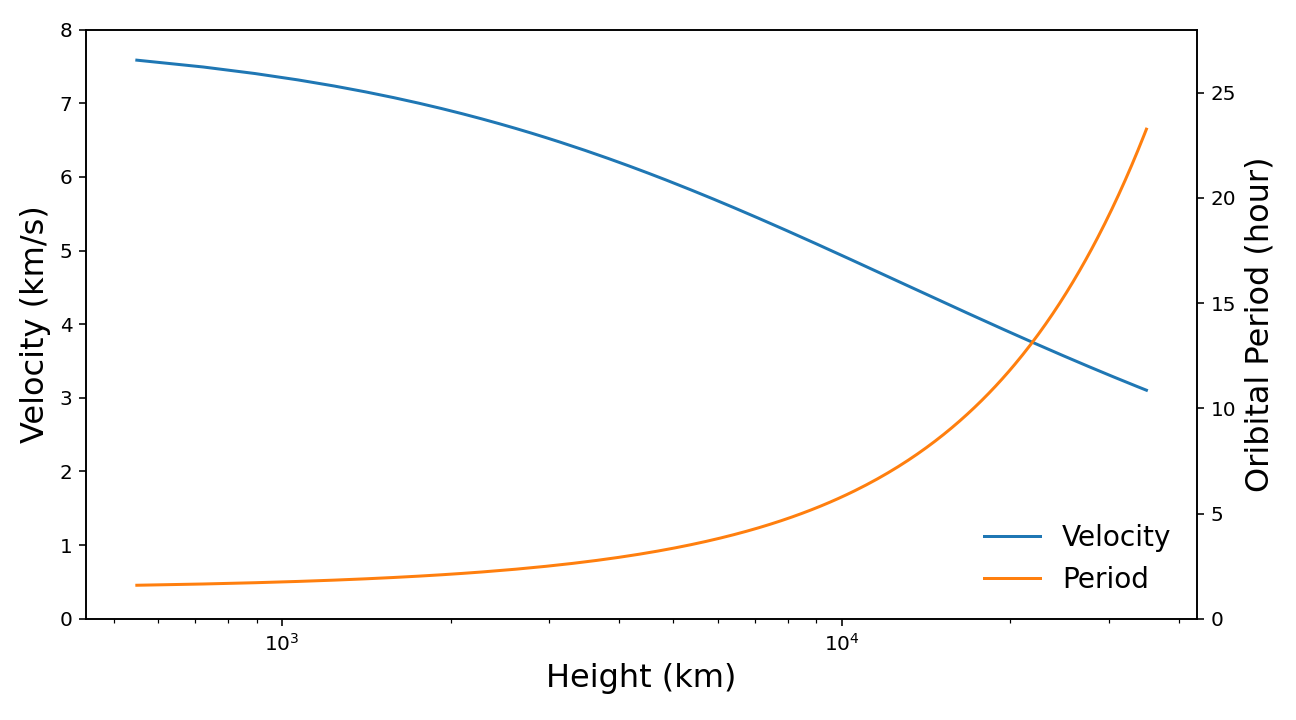
人工衛星の速度を高度別に表示してみます. 青い実線が人工衛星の速度を表しています (左軸). スターリンク衛星などが周回している高度 550 km 付近では 7 km/s ほどの速度で運動しています. 高度が上がるに連れて速度は低下し, 高度 30,000 km 付近では 3 km/s ほどになります. オレンジ色の実線は軌道周期を表しています (右軸). 地球低軌道では 1 時間に満たない周期で周回しますが, 高度 35,000 km 付近ではちょうど 24 時間ほどで周回します (静止軌道).
みかけの運動
\(\theta\) と \(\phi\) の関係を導出します. 簡単な図形の関係から以下の式を得ます.
ここで \(D\) は人工衛星と観測者の距離です. また等速円運動をしていることから以下の式を得ます.
以上の式から観測者から見た見かけの速度を求めます.
もっと整理できる1 かもしれませんが, 実用上問題なかったのでここで止めておきます.
横軸を人工衛星の軌道位相 \(\theta\) としてみかけの速度を図示しました.
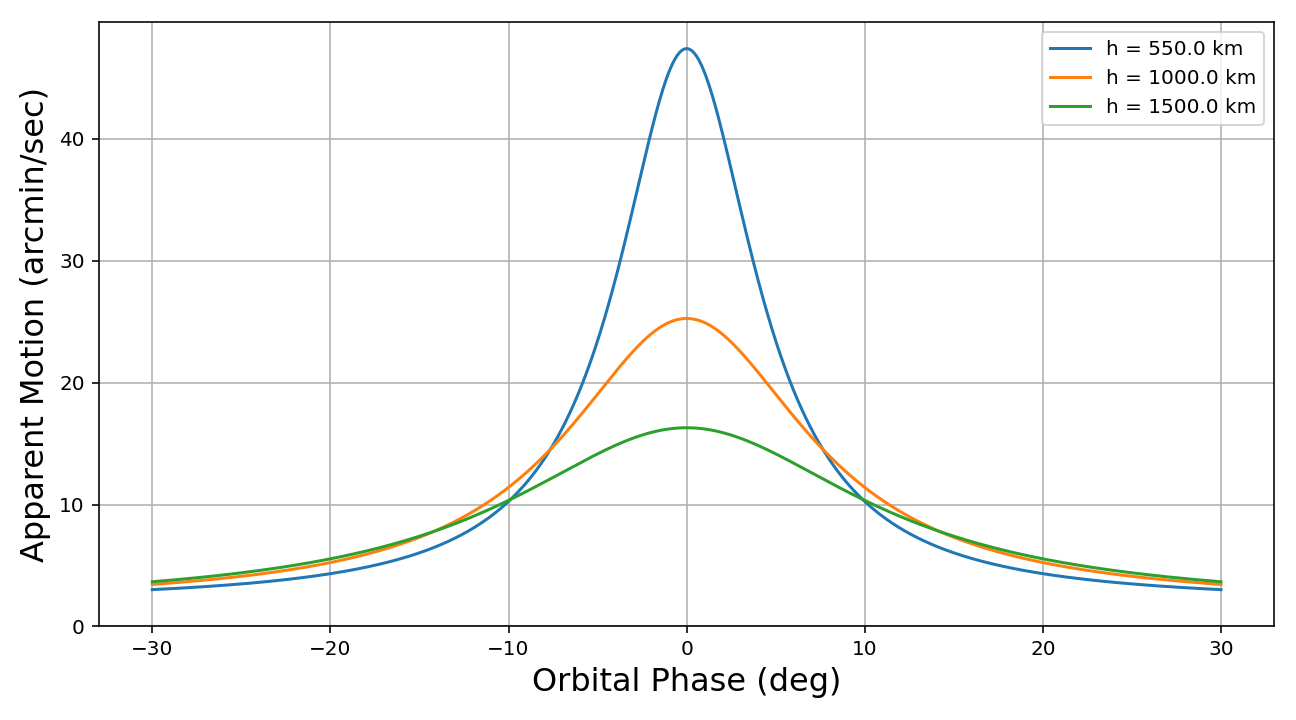
ここでは高度 550, 1000, 1500 km を周回する人工衛星に対して計算しました. \(\theta=0\) の天頂付近を通過すると気にみかけの速度が大きくなることがわかります. 高度 550 km を周回する人工衛星は最大で 50′/sec ほどの移動速度を持つことがわかります. 天頂での速度は以下の式で計算できます.
高度が低くなると最大の移動速度は反比例で低下します. また速度の変化具合も緩やかになり, なだらかで幅の広いピークを持つようになります.
以下では横軸を観測者から見た衛星の仰角 (観測高度) \(el = 90^\circ - \left|\phi\right|\) にして図示しました.
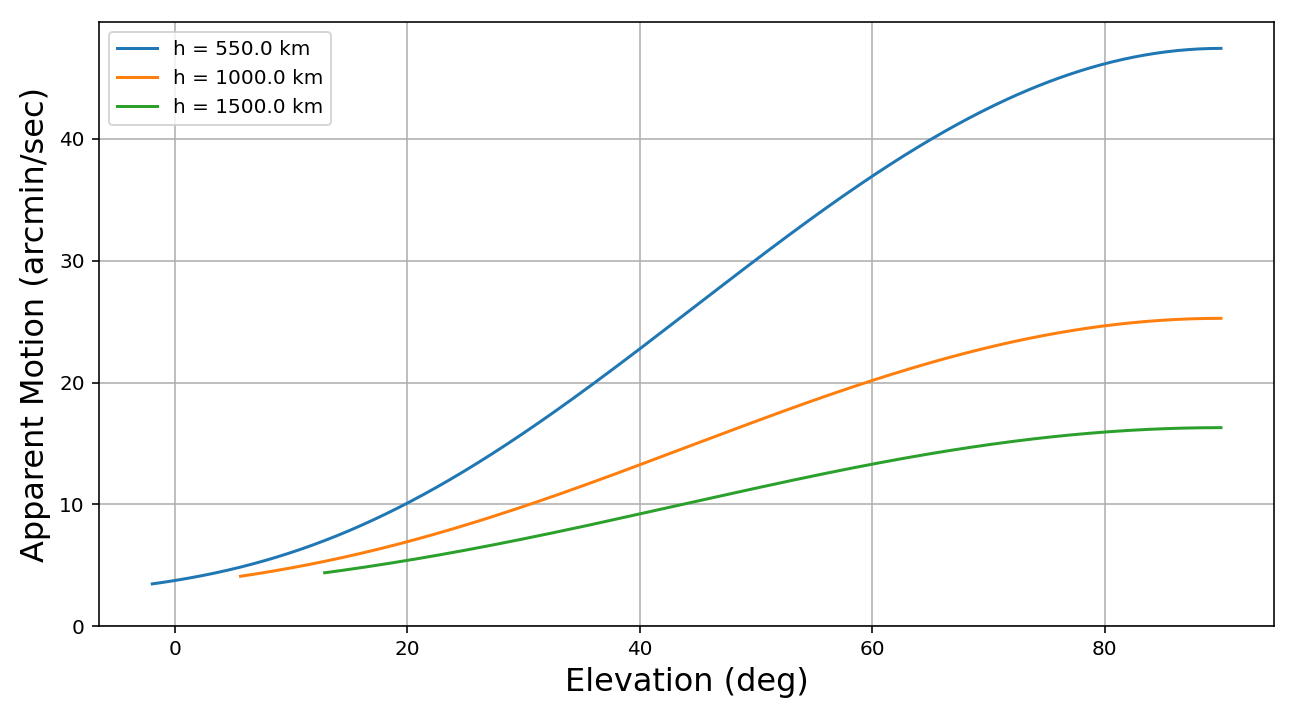
観測高度 30° 以上が観測可能だとします. 高度 550 km を周回する人工衛星を観測する場合の移動速度およそ 15′/sec 以上となることがわかります.
最後にこの人工衛星がカメラの画素を横切る通過時間を見積もってみます. カメラの情報は参考までに東京大学木曽観測所 Tomo-e Gozen の値を使用します. ピクセルを空に投影したときの大きさはおよそ 1.18″ です (参照). 望遠鏡を地球に対して静止させたときに人工衛星がピクセルを通過する時間を図示しました.
![]()
同じく観測高度 30° 以上が観測可能だとすると, 高度 550 km を周回する人工衛星は 1.5 ms よりも短い時間で画素を通過することがわかります. 参考として右軸に対応するフレームレートを表示しました. 地球低軌道を周回する人工衛星を像ブレさせずに動画撮影するためには最大で 4 kHz 程度のフレームレートが必要になります.
-
この表記では \(\cos\phi = 0\) になるとき (地平線) に発散しそうですが, うまい具合に打ち消し合って有限の値になります. ↩